
-
全部
-
機(jī)器人與人機(jī)協(xié)作
-
增強(qiáng)現(xiàn)實(shí)與物聯(lián)網(wǎng)
-
傳感器與可穿戴
-
位置物聯(lián)網(wǎng)
-
柔性電子設(shè)備
-
運(yùn)動(dòng)感知與人機(jī)交互
新品上架
-
頭枕、靠墊、座椅、床墊設(shè)計(jì)
¥壓力分布測(cè)量系統(tǒng),壓力感應(yīng)墊 -
柔性壓力墊壓力測(cè)量系統(tǒng)
¥柔性壓力傳感器 -
Xsens MVN Analyze慣性運(yùn)動(dòng)捕
¥運(yùn)動(dòng)捕捉分析軟件 -
ViveLab Ergo3D虛擬空間中的
¥運(yùn)動(dòng)捕捉,人機(jī)工程學(xué)
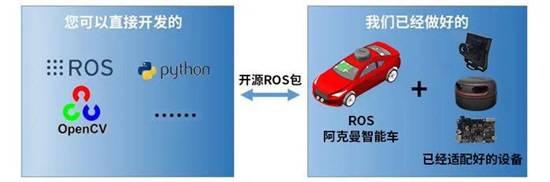
開(kāi)源ROS微型智能車無(wú)人駕駛與人工智能多智能體控制系統(tǒng)實(shí)驗(yàn)?zāi)M平臺(tái)
-
亮點(diǎn):
車聯(lián)網(wǎng) 無(wú)人駕駛?cè)斯ぶ悄?/i> -
簡(jiǎn)介:
微型智能車無(wú)人駕駛與人工智能多智能體控制系統(tǒng)實(shí)驗(yàn)?zāi)M平臺(tái)科研教學(xué)規(guī)劃展示更多智能機(jī)器人、無(wú)人車及傳感器融合與運(yùn)動(dòng)捕捉解決方案@南京合越智能 ROS全開(kāi)源阿克曼轉(zhuǎn)向智能網(wǎng)聯(lián)無(wú)人駕駛車”已經(jīng)為開(kāi)發(fā)人員 - 聯(lián)系報(bào)價(jià)咨詢購(gòu)買(mǎi)
產(chǎn)品介紹
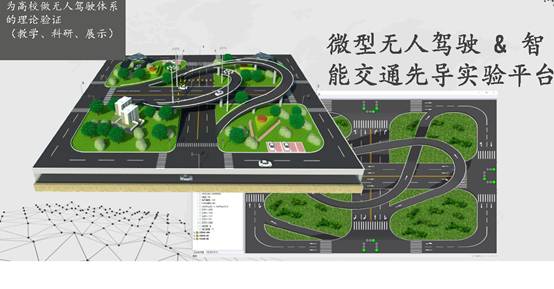
微型智能車無(wú)人駕駛與人工智能多智能體控制系統(tǒng)實(shí)驗(yàn)?zāi)M平臺(tái)
科研 教學(xué) 規(guī)劃 展示
更多智能機(jī)器人、無(wú)人車及傳感器融合與運(yùn)動(dòng)捕捉解決方案@南京合越智能
ROS開(kāi)源阿克曼轉(zhuǎn)向智能網(wǎng)聯(lián)無(wú)人駕駛車”已經(jīng)為開(kāi)發(fā)人員簡(jiǎn)化ROS入門(mén)所需要的預(yù)備知識(shí),編碼器、IMU、PID以及底盤(pán)的運(yùn)動(dòng)學(xué)模型,可以不用擔(dān)心,只需要掌握基本的Linux操作系統(tǒng)和ROS機(jī)器人操作系統(tǒng)的基本概念,就可以在ROS開(kāi)源的智能小車基礎(chǔ)上完成機(jī)器人的控制、SLAM建圖、自動(dòng)導(dǎo)航、避障等操作。
基于微型無(wú)人車的人工智能實(shí)驗(yàn)平臺(tái)8大場(chǎng)景:
傳感器融合,
視覺(jué)檢測(cè)流量分析,
交通調(diào)度,
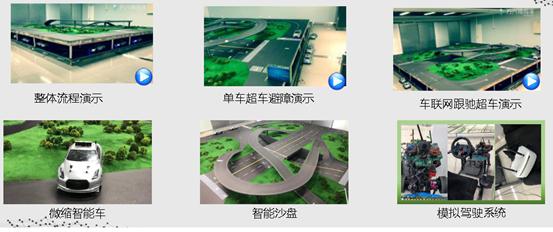
模擬駕駛,
安全避障超車,
車聯(lián)網(wǎng)規(guī)劃模擬,
多機(jī)器人協(xié)同控制,
運(yùn)動(dòng)定位。
實(shí)驗(yàn)平臺(tái)概況
實(shí)驗(yàn)平臺(tái)項(xiàng)目
平臺(tái)交叉學(xué)科創(chuàng)新體系

科研支持
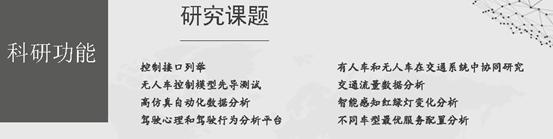
功能模塊
系統(tǒng)構(gòu)架

涉及的技術(shù)領(lǐng)域

微型智能車功能

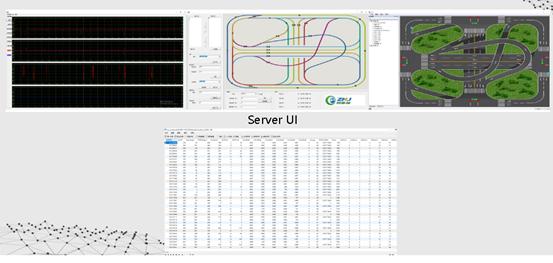
中控系統(tǒng)

軟件UI
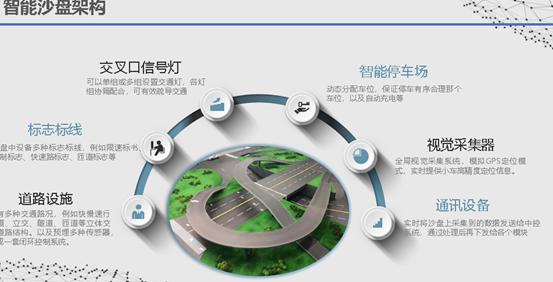
智能沙盤(pán)模擬
更多智能機(jī)器人、無(wú)人車及傳感器融合與運(yùn)動(dòng)捕捉解決方案@南京合越智能

咨詢?cè)撋唐穬r(jià)格
品名:開(kāi)源ROS微型智能車無(wú)人駕駛與人工智能多智能體控制系統(tǒng)實(shí)驗(yàn)?zāi)M平臺(tái)
其他商品
-
franka Panda 7軸協(xié)作、觸覺(jué)敏感
¥franka 協(xié)作機(jī)器人 -
開(kāi)源ROS微型智能車無(wú)人駕駛與人工
¥車聯(lián)網(wǎng) 無(wú)人駕駛?cè)斯ぶ悄?/span> -
基于Husky與UR的復(fù)合操作移動(dòng)機(jī)器
¥Husky UR